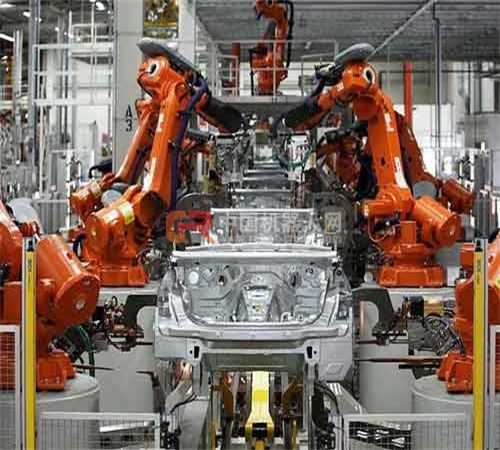
人工智能标记之一是可以感知外部天下并根据感知信息而采纳顺应性行为。要使焊接机器人焊接体系具有必然的智能,研讨焊接机器人对焊接环境、焊缝位置及走向和焊接静态进程的智能传感手艺是十分必要的。机器人具有对焊接环境的感知功用可利用计算手艺视觉手艺实现,将对焊接工件团体或部分环境的视觉模子作为计划焊接使命、无碰途径及焊接参数的根据,这里需求成立三维视觉硬件体系,和实现图象了解、物体支解、辨认算法软件等手艺。
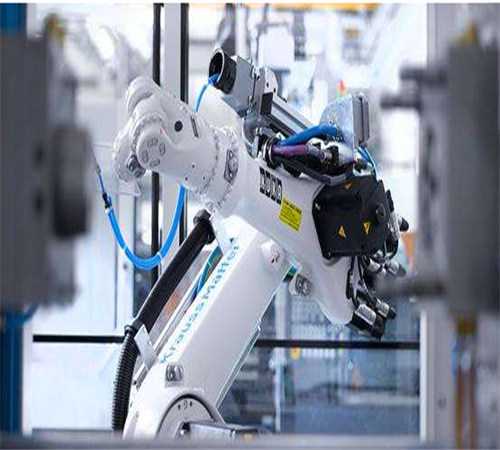
视觉焊缝跟踪传感器是焊接机器人传感体系的中心和根本之一。为了获得焊缝接头的三维轮廓并克制焊接过程中弧光的滋扰,机器人焊缝跟踪辨认手艺一样平常是采纳激光、布局光等主动视觉的办法,进而精确扶引机器人焊枪终端沿事实焊缝完成希冀的轨迹活动。因为采纳的主动光源的能量大都比电弧光的能量小,一样平常将这类传感器放在焊枪的前端以避开弧光直射的滋扰。主动光源一样平常为单光面或多光面的激光域扫描的激光束,处置稳固、简朴、实用性好。

构造光视觉是主动视觉焊缝跟踪的另一种情势,相应的传感器主要有两部分构成:一个是投影器,用它的辐射能量构成一个投影光面;一个是光电位置探测器件,常采纳面阵CCD摄像机。它们以必定的位置干系装配后,并配以必定的算法,便构成了构造光视觉传感器,它能感知投影面上全部可视点的三维信息。一条空间焊缝的轨迹可看成是由一系列离散点构成的,其麋集水平依据节制的须要而定,焊缝坐标系的原点便建立在这一些点上,传感器每一次测得一个焊缝点位姿并可取得未知焊缝点的位姿启示信息。扶引机器人焊枪完成全部平滑接连焊缝的跟踪。
焊接静态进程的实时检验手艺次要指正在焊接进程中对熔池尺寸、熔透、成形和屯弧行动等参数的正在线检验,进而实现焊接质量的实时掌握。因为焊接进程的:弧光滋扰庞杂的物理化学反应、强非线性和大批的不确定性因素的作用,使得对焊接进程靠得住而有用的检验成为瞩目标困难。长期以来;已经有浩繁学者探索过用多种门路及手艺手腕检验实验,正在肯定条件下取得了胜利,各类不一样的检验手腕、信息处理方式和不一样的传感道理、手艺实现手腕,实质上是请求综合手艺的进步。由熔池静态变更和熔透特点检验来看,现阶段以为计算机视觉手艺、温度场丈量、熔池鼓励振荡、电弧传感等方式适用于实时掌握的结果较好。
 相关文章
相关文章

 排行榜
排行榜 最新看点
最新看点











 编辑推荐
编辑推荐