步调1:机关车身
闪兔分拣机器人利用3M双面泡沫胶带将4个舵机跟电池粘正在一路。一个小盒子将资助你对齐伺服器。(正在我的环境下是RaspberryPi外壳)
将轮子粘到舵机上。依据车轮外形的巨细,你能够须要将胶带切成适合的外形。
将微型控制器或微型面包板粘正在电池顶部。
步调2:毗邻电线
将伺服器跟微控制器的电源跟地线毗邻到电池。若是你须要给电池充电,则可以利用JST插头。
将伺服脉冲引脚毗邻到BlunoBeetle的数字引脚2、3、4、5。若是你利用面包板,请依照上图所示毗邻伺服器。
中国分拣机器人研究报告湖北高速分拣机器人若是你健忘了引脚的次序,请不要介怀,咱们可以稍后正在代码中停止变动。/p》
步调3:调试Servos
留神:正在拔出USB电缆之前,请先断开3.7V电池的毗邻!
测试伺服器是不是畸形事情:
#include
伺服伺服器;
有效设置{
伺服毗邻;
伺服写入;
}
有效轮回{
}
测验考试分歧的值,然后为你的伺服找到一个伺服终止的值。
步调4:增添遥控器
下一步是增添遥控器。我将利用一个名为GoBLE的现有应用程序。
下载GoBLE库并将该库装置正在Arduino文件夹中。借可以利用ArduinoLibraryManager装置Metro库。
你可以下载以下完全代码:
请留神,若是已毗邻USB电缆,则蓝牙串行能够正在9600上事情,可是若是断开USB电缆并利用电池电源,则波特率能够变成115200。要办理此问题,你将须要对USB利用分歧的波特率
步调5:你已实现!
中国分拣机器人在外国由微型伺服器供给能源,这个小机器人可以承载更多器材。
全自动快递分拣机器人工作原理因为有4个模拟引脚,是以你借可以增添IR传感器。经由过程将同一侧的两个伺服器毗邻到不异的数字引脚,你借可以为超声波传感器节俭2个数字引脚。
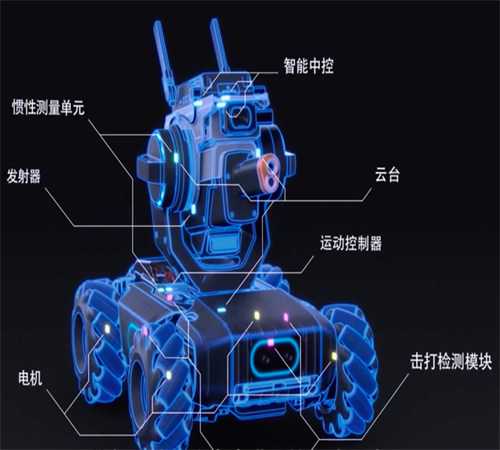
你能够曾经留神到,机器人的底盘与RaspberryPi的巨细大致相同。。为何没有构建带有轮子的RaspberryPi?(下面的照片让你相识了它的样子,但实际上可以构建它。)
分拣机器人能识别商品大小吗我的下一个方针是使该机器人更小并经由过程ESP8266模块毗邻到Internet。
快递分拣机器人系统设计分拣机器人是什么样子的全自动分拣机器人价格 相关文章
相关文章

 排行榜
排行榜 最新看点
最新看点











 编辑推荐
编辑推荐




