人类善于利用手指触觉来感知物体的物理特性(包括质量、重心、转动惯量、表面摩擦等),从而完成高难度的控制任务。在不远的将来,机器人也会拥有触觉分析能力。在刚刚结束的机器人顶会IROS2020上,上海交大MIT联合项目SwingBot为我们展示了如何让机器人通过触觉传感器来学习感知物体复杂的物理特性(tactileexploration),从而完成一个高难度的甩笔任务(in-handobjectswing-up)。该工作也摘得此次大会的最佳论文奖项。
自动分拣机器人多少钱一台该项目通过对多种触觉探索动作的信息融合,让机器人端到端的去学习概括手中物体的物理特性,并依靠这个物理特征来实现高难度的手上控制任务(in-handswing-up)。更多的详细内容可以访问论文原文和项目主页:
高精度、低成本的触觉传感器研究人员使用的是一款名为GelSight的机器人触觉传感器,该传感器也发明于此MIT项目组(指导教授:EdwardAdelson)。区别于传统触觉传感器依赖于稀疏的电极阵列,GelSight是一个基于光学的触觉传感器,通过一个微型相机来拍摄接触面的三维几何形变,可以返回高精度的触觉信息(见下图是GelSight重建的奥利奥饼干表面)。更值得一提的是,因为只需要一个低成本的微型摄像头和一个树莓派控制器,GelSight的制作总成本只有100美金,远低于市面上的其他触觉传感器。
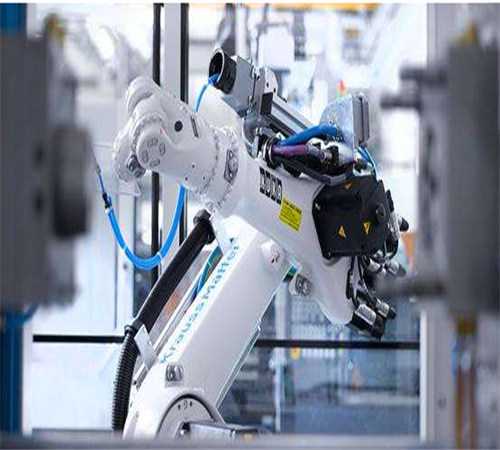
GelSight触觉信息效果图。来源:[2]在本篇工作中,研究人员将GelSight安装在了机器人二爪夹具的一侧,通过在传感器上标定靶点和重建三维信息,高密度的力学反馈可以以每秒60帧的速度实时传输出来。
基于多种触觉探索动作的物理特性分析能力人类可以通过多种触觉探索动作来概括手上物体的物理特性[1],而且人类并不需要测量这些物理参数的精确数值,而是用自己的经验结合触觉手感来实现对手中物体高难度的控制。受这个观察的启发,该项目的研究人员首先提出了一个多触觉探索的信息融合模型(Informationfusionmodelformultipletactileexplorationactions),该模型的目的是整合不同的机器人触觉探索动作信息到一个共同的物理特性特征空间(Physicalembedding)中,从而实现对物体多种物理特性(质量、重心位置、转动惯量和摩擦力)的概括能力。
多触觉探索动作的信息融合模型。来源:论文研究人员为机器人设计了两种基础的探索动作:紧握物体并旋转一定角度和放松紧握状态并抖动物体。动作的触觉反馈信息会通过一个卷积神经网络来输出一个一维的特征向量;动作的抖动因为是时序信息,会用一个循环神经网络来处理获得相应的特征。这两个特征信息通过拼接和一个由若干多层感知器组成的融合模型进行整合,得到一个低维的物理特征概括(physicalfeatureembedding)。区别于逐个测量每种不同的物理特性,这种信息整合模型的一大优势是可以根据任务来自主调节对不同物理信息的关注程度,因为很多任务是无法明确分析出是哪一种物理特性起到了主导作用,而使用该方法可以让机器人自主地学习并选择需要的物理信息。此外,这两个触觉探索动作加起来只需要7秒的时间,相比于用精密的仪器来逐个测量物体的质量和摩擦力等,该方法的效率也有很大的提升,并且不需要额外的测量仪器的辅助,更接近人类的触觉感知能力。此外,为了让机器人自主学习选择最需要的物理信息,研究人员接着提出了一个控制预测模型,该模型通过输入先前获得的物理特征向量和机器人控制参数,来预测最终物体会被甩到的角度。在训练过程中,整个流程是用一个端到端的训练算法来实现的。研究人员设计了一个机器人自动采集数据的系统,并且3D打印了可以随意调节物理特性的模型来采集数据,具体如下两个动图所示:
京东物流agv分拣机器人可变物理特性的模板物体。
分拣机器人颜色识别数据收集流程。研究人员让机器人自主采集了1350次甩笔的数据,其中包含了27个不同物理特性的物体。在测试的时候,研究人员额外选择了6个训练数据中不包含的新物体,机器人需要通过触觉探索模型来确定未知物体的物理特性,并根据任务要求的最终甩到的角度,来选择一套成功率最高的控制参数。实验成果研究人员首先对比了使用和不使用多触觉探索融合算法对预测控制模型准确率的影响,其中融合算法在已知和未知物体上的预测误差率都远低于不使用触觉信息。此外融合算法的表现也比单一使用一种触觉探索动作(Tilt.:tilting-only,Shak.:shaking-only)的算法效果好。
以下是机器人在测试过程中,通过使用多触觉探索融合算法来实现对未知物体的物理特性探索和上甩效果。第一个任务要求将物体上甩至相对于传感器90度的角度位置:
第二个任务要求将物体上甩至相对于传感器180度的位置:
产品分拣机器人湖北分拣机器人设备研究人员紧接着探索融合算法学习到的物理特征空间到底包含哪些信息。他们用一组额外的多层感知器来回归每一个物理特性的具体参数,并计算误差百分比。如下表所示,可以发现第一个旋转动作对物体的质量、重心和转动惯量(Momentofinertia)的信息捕捉更准确。而第二个摇晃动作对物体接触部分的摩擦力的把握更准。将两种探索动作融合的算法取得了最好的回归准确率。
最后研究人员进一步探索所学习到的物理特征空间是如何能够做到对未知物体依然适用的。他们可视化了6个未知物体的数据分布并展示在了下图(b)中,其中x轴表示控制参数,y轴表示最终上甩的角度。在图(a)中,研究人员用PCA提取了每个采样中网络输出的物理特征向量的主成分并可视化在这个二维点图中。观察可以发现,如果两个物体的控制策略相近,他们的物理特征间距也会越近,而两个物体的控制策略相差较大,则在特征空间上的间距也会更大。
北京垃圾分拣机器人智能全自动分拣机器人三维分拣机器人 相关文章
相关文章



 排行榜
排行榜 最新看点
最新看点








 编辑推荐
编辑推荐






